People Detection in RGB-D Data (Kinect based people detection) HD
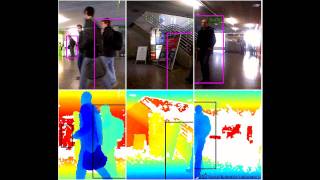
[OVERVIEW] RGB-D people detection (no tracking). The video has been recorded with 3 vertically arranged Kinect RGB-D sensors in a busy university lobby. This method is able to detect people up to 8m range, nearly four times larger than the specification of the Kinect sensor. The detector makes use of depth and image data. [PAPER] Title: People Detection in RGB-D Data Authors: L.Spinello, K.O.Arras -- SRL Lab, University of Freiburg, Germany In International Conference Intelligent Robots and Systems (IROS) 2011 pdf: http://www.informatik.uni-freiburg.de/~spinello/spinelloIROS11.pdf project page: http://www.informatik.uni-freiburg.de/~spinello/IROS2011.html People detection is a key issue for robots and intelligent systems sharing a space with people. Previous works have used cameras and 2D or 3D range finders for this task. In this paper, we present a novel people detection approach for RGB-D data. We take inspiration from the Histogram of Oriented Gradients (HOG) detector and from the depth characteristics of the Kinect RGB-D sensor to design a robust method to detect people in dense depth data, called Histogram of Oriented Depths (HOD). HOD locally encodes the direction of depth changes and relies on an depth-informed scale-space search that leads to a 3-fold acceleration of the detection process. We then propose Combo-HOD, a RGB-D detector that combines HOD and HOG responses. The experiments include a comprehensive comparison with several alternative detection approaches including visual HOG, several variants of HOD, a geometric person detector for 3D point clouds, and an Haar-based AdaBoost detector. The results demonstrate the robustness of HOD and Combo-HOD on a real-world data set collected in a populated indoor environment.
 HD
HD HD
HD HD
HD
 HD
HD
 HD
HD HD
HD HD
HD HD
HD HD
HD HD
HD HD
HD HD
HD HD
HD HD
HD HD
HD HD
HD HD
HD HD
HD HD
HD
 HD
HD HD
HD
 HD
HD
 HD
HD HD
HD HD
HD HD
HD HD
HD